


[ad_1]
Because the Neural Radiance Subject (NeRF) emerged lately, progressive view synthesis analysis has developed considerably. NeRF’s predominant idea is to make use of the differentiable quantity rendering method to enhance Multi-layer Perceptron (MLP) networks to encode the scene’s density and radiance fields. After coaching, NeRF can produce high-quality pictures from inventive digicam postures. Though NeRF could present photo-realistic rendering outcomes, coaching a NeRF may take hours or days owing to deep neural community optimization’s slowness, which restricts the vary of functions for which it may be used.
Current research present that grid-based methods like Plenoxels, DVGO, TensoRF, and Prompt-NGP permit for fast coaching of a NeRF in minutes. But, when an image will get bigger, the reminiscence use of such grid-based representations will increase in cubic order. Voxel pruning, tensor decomposition, and hash indexing are just some of the methods which have been urged to lower reminiscence utilization. Nonetheless, these algorithms can solely deal with constrained scenes when grids are constructed within the authentic Euclidean area. An area-warping approach that converts an unbounded area to a restricted one is a steadily used method to explain unbounded sceneries.
Sometimes, there are two several types of warping capabilities. (1) For forward-facing scenes (Fig. 1 (a)), the Normalized Machine Coordinate (NDC) warping is used to map an infinitely-far view frustum to a bounded field by squashing the area alongside the z-axis. (2) For 360° object-centric unbounded scenes, the inverse-sphere warping can map an infinitely massive area to a bounded sphere by the sphere inversion transformation. Nonetheless, these two warping methods can’t accommodate random digicam trajectory patterns and as an alternative assume sure ones. The standard of produced photos significantly suffers when a trajectory is prolonged and includes a number of gadgets of curiosity, often called free trajectories, as seen in Fig. 1(c).
The uneven spatial illustration capability allocation results in decreased free trajectories efficiency. Particularly, quite a few surroundings areas stay vacant and invisible to any enter views when the trajectory is prolonged and slim. But, no matter whether or not the world is vacant, the grids of the current approaches are persistently tiled over the entire image. Consequently, a lot illustration functionality have to be recovered to unused area. Regardless that this squandering will be lowered by using progressive empty-voxel-pruning, tensor decomposition, or hash indexing, it nonetheless leads to blurry photos since GPU reminiscence is constrained.
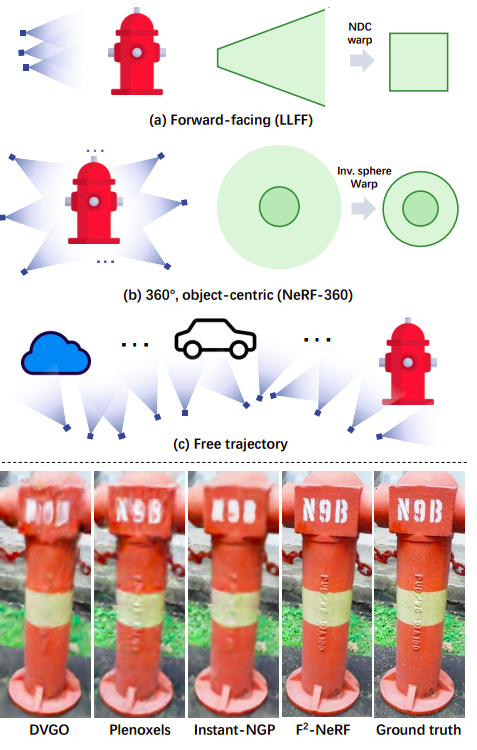
Moreover, solely sparse and much enter views fill the background areas, whereas many foreground gadgets in Fig. 1 (c) are noticed with dense and shut enter views within the viewable areas. On this situation, dense grids ought to be assigned to the foreground objects to keep up kind particulars, and coarse grids ought to be positioned within the background space for the very best utilization of the spatial illustration of the grid. Nevertheless, present grid-based techniques distribute grids uniformly over the world, which ends up in inefficient use of the consultant capability. Researchers from College of Hong Kong, S-Lab NTU, Max Plank Institute and Texas A&M College counsel F2 -NeRF (Quick-Free-NeRF), the primary quick NeRF coaching method that enables without cost digicam trajectories for large, unbounded scenes, to resolve the abovementioned points.
F2 – NeRF, based mostly on the Prompt-NGP framework, preserves the fast convergence pace of the hash-grid illustration and will be educated nicely on unbounded scenes with completely different digicam trajectories. Primarily based on this commonplace, they create perspective warping, a primary space-warping approach that may be utilized to any digicam trajectory. They define the factors for an applicable warping perform for any digicam setup in F2 – NeRF.
The elemental precept of perspective warping is to first describe the place of a 3D level p by concatenating the 2D coordinates of the projections of p within the enter photos. Then, utilizing Precept Element Evaluation (PCA), map these 2D coordinates right into a compact 3D subspace area. They display empirically that the proposed perspective warping is a generalization of the present NDC warping and the inverse sphere warping to arbitrary trajectories. The attitude warping can deal with random trajectories whereas might robotically degenerate to those two warping capabilities in forward-facing scenes or 360° object-centric scenes.
In addition they present an area subdivision method to adaptively make use of coarse grids for background areas and slim grids for foreground areas to attain perspective warping in a grid-based NeRF framework. They conduct complete assessments on the unbounded forward-facing dataset, the unbounded 360 object-centric datasets, and a brand new unbounded free trajectory dataset. The assessments display that F2 – NeRF renders high-quality photos on the three datasets with varied trajectory patterns utilizing the identical perspective warping. Their answer beats commonplace grid-based NeRF algorithms on the brand new Free dataset with free digicam trajectories, solely taking round 12 minutes to coach on a 2080Ti GPU.
Take a look at the Paper and Project. All Credit score For This Analysis Goes To the Researchers on This Venture. Additionally, don’t overlook to affix our 17k+ ML SubReddit, Discord Channel, and Email Newsletter, the place we share the most recent AI analysis information, cool AI tasks, and extra.
Aneesh Tickoo is a consulting intern at MarktechPost. He’s presently pursuing his undergraduate diploma in Knowledge Science and Synthetic Intelligence from the Indian Institute of Know-how(IIT), Bhilai. He spends most of his time engaged on tasks geared toward harnessing the facility of machine studying. His analysis curiosity is picture processing and is obsessed with constructing options round it. He loves to attach with folks and collaborate on fascinating tasks.
[ad_2]
Source link