

[ad_1]
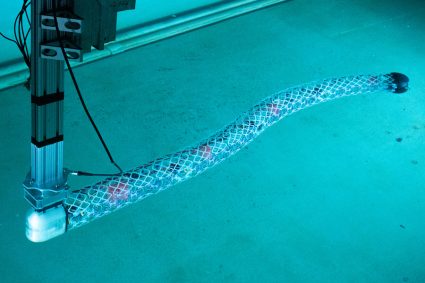
Researchers have give you an progressive strategy to constructing deformable underwater robots utilizing easy repeating substructures. The staff has demonstrated the brand new system in two completely different instance configurations, one like an eel, pictured right here within the MIT tow tank. Credit score: Courtesy of the researchers
By David L. Chandler | MIT Information Workplace
Underwater buildings that may change their shapes dynamically, the way in which fish do, push by water far more effectively than typical inflexible hulls. However developing deformable gadgets that may change the curve of their physique shapes whereas sustaining a easy profile is an extended and troublesome course of. MIT’s RoboTuna, for instance, was composed of about 3,000 completely different elements and took about two years to design and construct.
Now, researchers at MIT and their colleagues — together with one from the unique RoboTuna staff — have give you an progressive strategy to constructing deformable underwater robots, utilizing easy repeating substructures as an alternative of distinctive elements. The staff has demonstrated the brand new system in two completely different instance configurations, one like an eel and the opposite a wing-like hydrofoil. The precept itself, nonetheless, permits for nearly limitless variations in type and scale, the researchers say.
The work is being reported within the journal Tender Robotics, in a paper by MIT analysis assistant Alfonso Parra Rubio, professors Michael Triantafyllou and Neil Gershenfeld, and 6 others.
Current approaches to tender robotics for marine purposes are usually made on small scales, whereas many helpful real-world purposes require gadgets on scales of meters. The brand new modular system the researchers suggest may simply be prolonged to such sizes and past, with out requiring the sort of retooling and redesign that may be wanted to scale up present methods.
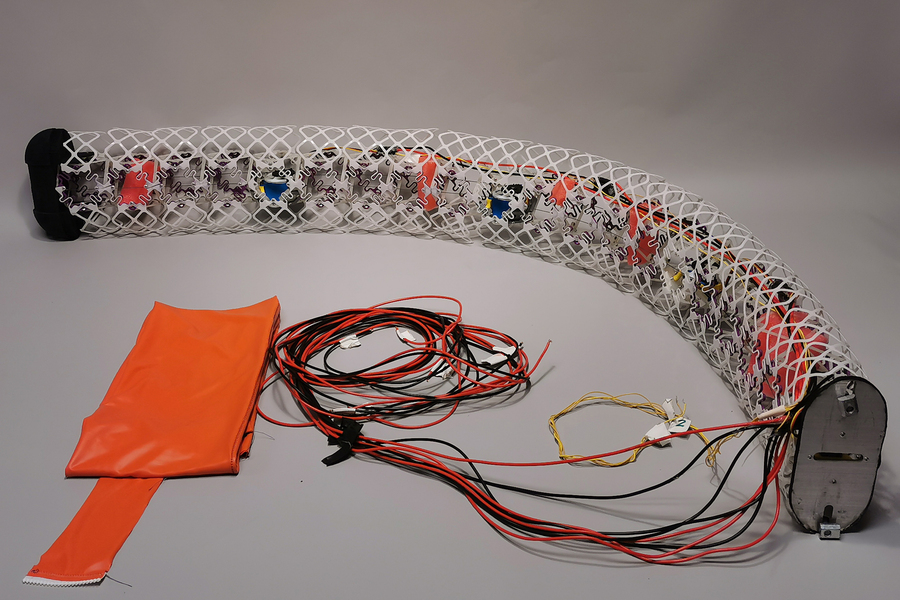
The deformable robots are made with lattice-like items, known as voxels, which might be low density and have excessive stiffness. The deformable robots are made with lattice-like items, known as voxels, which might be low density and have excessive stiffness. Credit score: Courtesy of the researchers
“Scalability is a powerful level for us,” says Parra Rubio. Given the low density and excessive stiffness of the lattice-like items, known as voxels, that make up their system, he says, “we’ve extra room to maintain scaling up,” whereas most at the moment used applied sciences “depend on high-density supplies dealing with drastic issues” in transferring to bigger sizes.
The person voxels within the staff’s experimental, proof-of-concept gadgets are principally hole buildings made up of solid plastic items with slim struts in complicated shapes. The box-like shapes are load-bearing in a single route however tender in others, an uncommon mixture achieved by mixing stiff and versatile elements in numerous proportions.
“Treating tender versus onerous robotics is a false dichotomy,” Parra Rubio says. “That is one thing in between, a brand new approach to assemble issues.” Gershenfeld, head of MIT’s Center for Bits and Atoms, provides that “it is a third method that marries the most effective components of each.”
“Clean flexibility of the physique floor permits us to implement circulate management that may cut back drag and enhance propulsive effectivity, leading to substantial gas saving,” says Triantafyllou, who’s the Henry L. and Grace Doherty Professor in Ocean Science and Engineering, and was a part of the RoboTuna staff.
Credit score: Courtesy of the researchers.
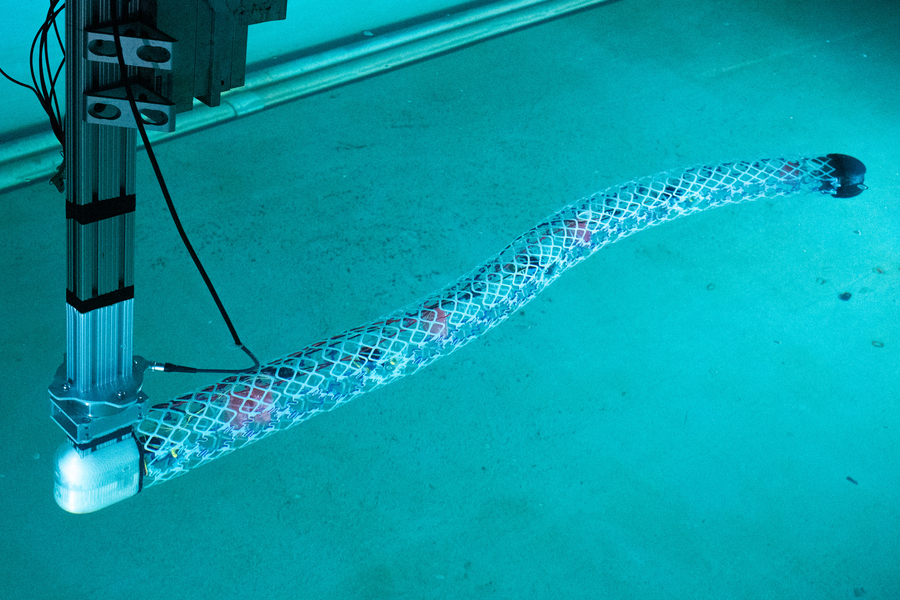
In one of many gadgets produced by the staff, the voxels are connected end-to-end in an extended row to type a meter-long, snake-like construction. The physique is made up of 4 segments, every consisting of 5 voxels, with an actuator within the heart that may pull a wire connected to every of the 2 voxels on both facet, contracting them and inflicting the construction to bend. The entire construction of 20 items is then coated with a rib-like supporting construction, after which a tight-fitting waterproof neoprene pores and skin. The researchers deployed the construction in an MIT tow tank to point out its effectivity within the water, and demonstrated that it was certainly able to producing ahead thrust ample to propel itself ahead utilizing undulating motions.
“There have been many snake-like robots earlier than,” Gershenfeld says. “However they’re usually manufactured from bespoke elements, versus these easy constructing blocks which might be scalable.”
For instance, Parra Rubio says, a snake-like robotic constructed by NASA was made up of hundreds of distinctive items, whereas for this group’s snake, “we present that there are some 60 items.” And in comparison with the 2 years spent designing and constructing the MIT RoboTuna, this machine was assembled in about two days, he says.

The person voxels are principally hole buildings made up of solid plastic items with slim struts in complicated shapes. Credit score: Courtesy of the researchers
The opposite machine they demonstrated is a wing-like form, or hydrofoil, made up of an array of the identical voxels however capable of change its profile form and due to this fact management the lift-to-drag ratio and different properties of the wing. Such wing-like shapes could possibly be used for quite a lot of functions, starting from producing energy from waves to serving to to enhance the effectivity of ship hulls — a urgent demand, as transport is a major supply of carbon emissions.
The wing form, not like the snake, is roofed in an array of scale-like overlapping tiles, designed to press down on one another to keep up a water-proof seal even because the wing modifications its curvature. One potential utility may be in some sort of addition to a ship’s hull profile that might cut back the formation of drag-inducing eddies and thus enhance its total effectivity, a risk that the staff is exploring with collaborators within the transport trade.

The staff additionally created a wing-like hydrofoil. Credit score: Courtesy of the researchers
In the end, the idea may be utilized to a whale-like submersible craft, utilizing its morphable physique form to create propulsion. Such a craft that might evade dangerous climate by staying beneath the floor, however with out the noise and turbulence of typical propulsion. The idea may be utilized to elements of different vessels, reminiscent of racing yachts, the place having a keel or a rudder that might curve gently throughout a flip as an alternative of remaining straight may present an additional edge. “As a substitute of being inflexible or simply having a flap, should you can truly curve the way in which fish do, you possibly can morph your method across the flip far more effectively,” Gershenfeld says.
The analysis staff included Dixia Fan of the Westlake College in China; Benjamin Jenett SM ’15, PhD ’ 20 of Discrete Lattice Industries; Jose del Aguila Ferrandis, Amira Abdel-Rahman and David Preiss of MIT; and Filippos Tourlomousis of the Demokritos Analysis Heart of Greece. The work was supported by the U.S. Military Analysis Lab, CBA Consortia funding, and the MIT Sea Grant Program.
[ad_2]
Source link
