

[ad_1]
The issue of sparsity and degeneracy points in LiDAR SLAM has been addressed by introducing Quatro++, a strong international registration framework developed by researchers from the KAIST. This technique has surpassed earlier success charges and improved loop closing accuracy and effectivity by floor segmentation. Quatro++ displays considerably superior loop closing efficiency, leading to larger high quality loop constraints and extra exact mapping outcomes than learning-based approaches.
The research examines how international registration impacts graph-based SLAM, specializing in loop closing. In comparison with learning-based strategies, Quatro++ is especially efficient at closing loops, enhancing loop constraints, and producing extra correct maps. It additionally delivers constant outcomes throughout totally different viewpoints and reduces the trajectory distortions seen in different approaches.
The Quatro++ technique solves the essential job of 3D level cloud registration, which is key in robotics and laptop imaginative and prescient. Whereas many LiDAR-based SLAM strategies prioritize odometry or loop detection, the significance of loop closing in enhancing loop constraints has been understudied. To beat the sparsity and degeneracy challenges confronted by international registration strategies in LiDAR SLAM, Quatro++ introduces a strong international registration framework that comes with floor segmentation.
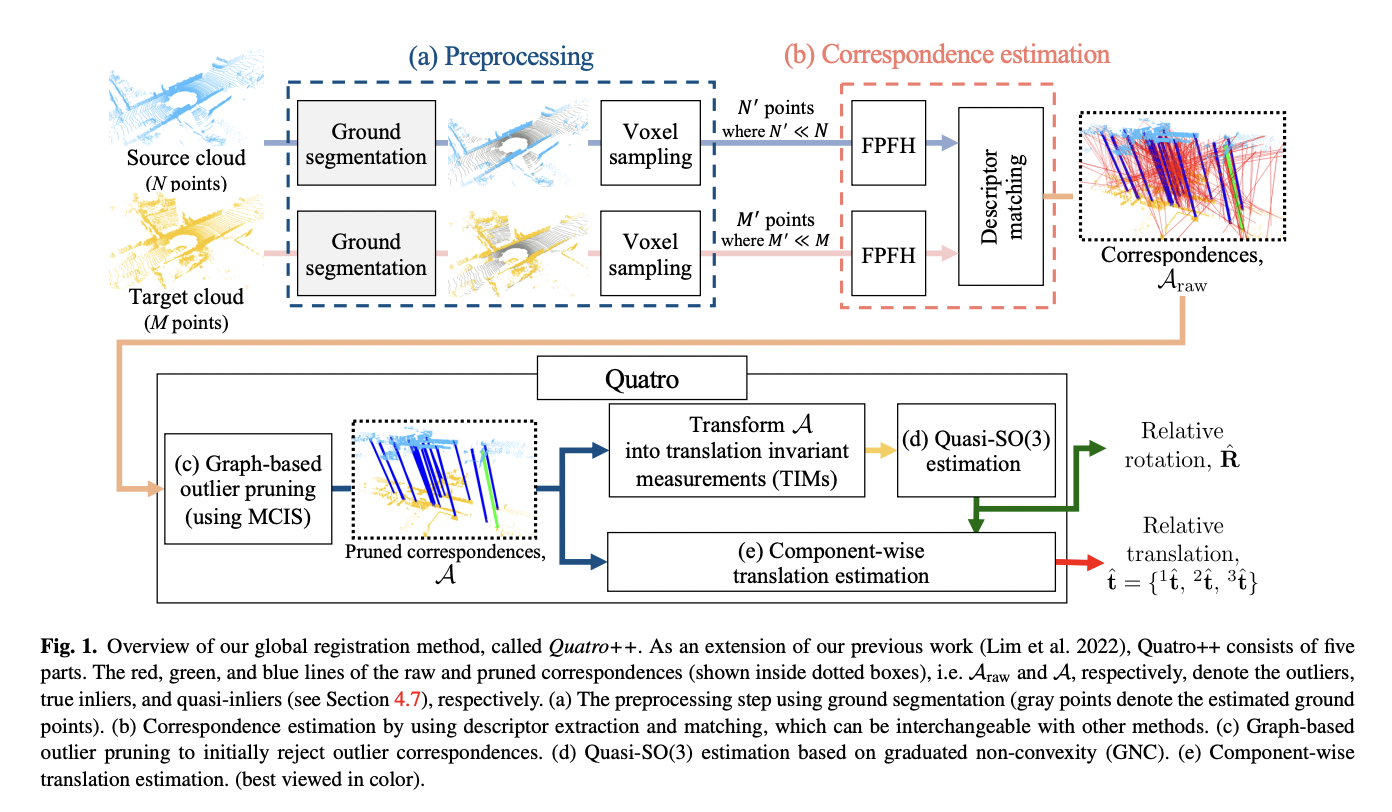
Quatro++ is a extremely efficient international registration framework for LiDAR SLAM that addresses problems with sparsity and degeneracy. It achieves this by using floor segmentation to reinforce strong registration, notably for floor automobiles. One key function that units Quatro++ aside is its use of a quasi-SO estimation with floor segmentation. Experimental outcomes on the KITTI dataset have demonstrated that Quatro++ can considerably improve translation and rotation accuracy in loop closing, and it has additionally been proven to be relevant in INS techniques by compensating for roll and pitch angles.
Quatro++ has demonstrated distinctive success in LiDAR SLAM, reaching the next success fee by addressing sparsity and degeneracy points. The framework’s floor segmentation has considerably improved success charges for floor automobiles in international registration, resulting in extra exact mapping and improved loop constraint high quality. Quatro++ has outperformed RANSAC, FGR, and TEASER in loop-closing throughout numerous datasets and LiDAR sensor configurations. Its feasibility in INS techniques, compensating for roll and pitch angles, highlights its versatility and applicability in numerous eventualities.
In conclusion, Quatro++ has efficiently addressed the challenges of sparsity and degeneracy in LiDAR SLAM international registration, outperforming present strategies with larger success charges. The bottom segmentation approach has considerably improved the robustness of registration and loop closing, leading to higher mapping precision. Though there are limitations within the front-end correspondence-based registration, the bottom segmentation has notably elevated success charges, notably in distant circumstances, whereas decreasing computational prices.
Try the Paper and Project. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t neglect to hitch our 33k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and Email Newsletter, the place we share the newest AI analysis information, cool AI initiatives, and extra.
If you like our work, you will love our newsletter..
Sana Hassan, a consulting intern at Marktechpost and dual-degree scholar at IIT Madras, is enthusiastic about making use of know-how and AI to handle real-world challenges. With a eager curiosity in fixing sensible issues, he brings a contemporary perspective to the intersection of AI and real-life options.
[ad_2]
Source link
