

[ad_1]
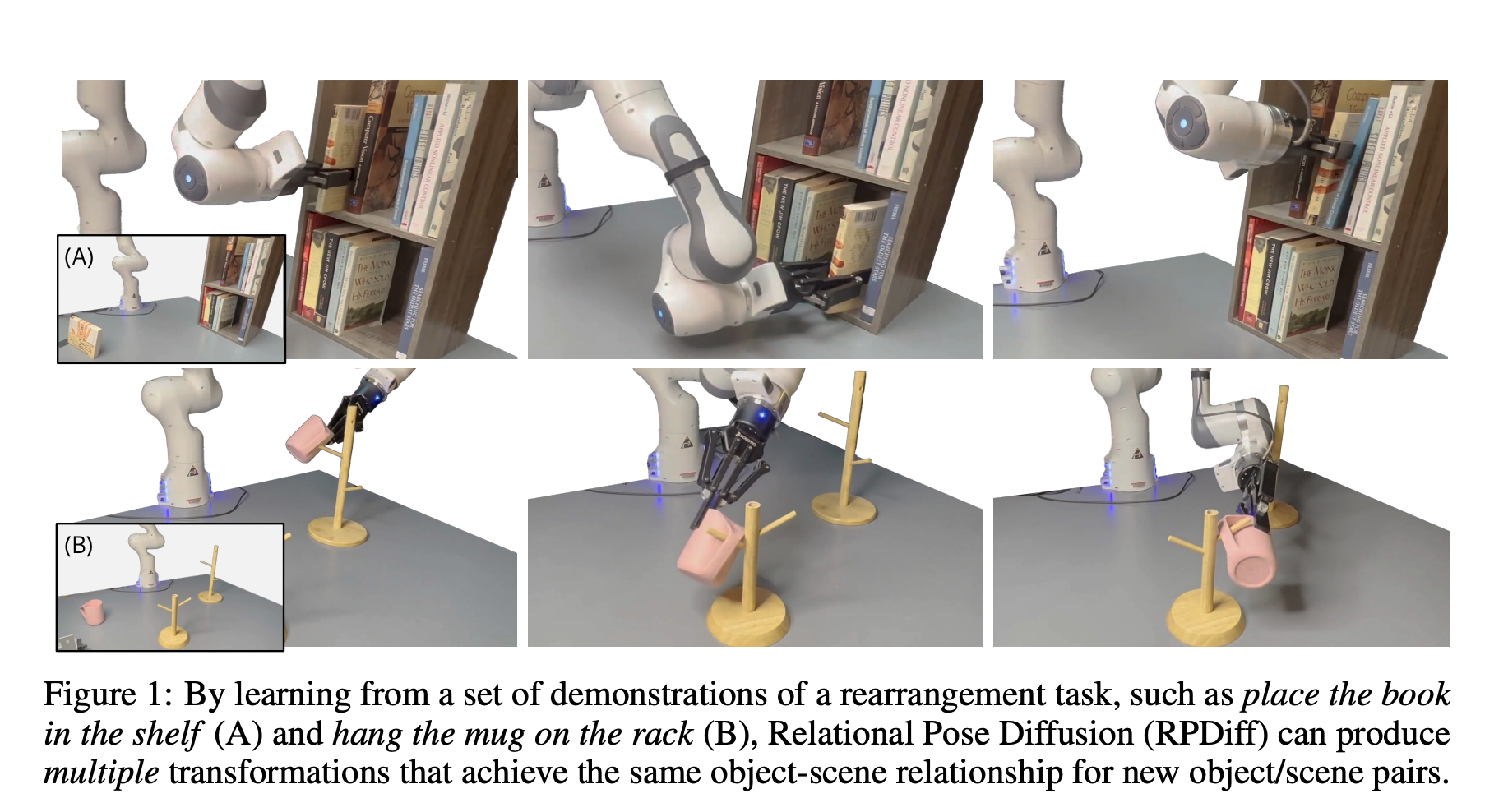
Robotics design and building to carry out each day duties is an thrilling and probably the most difficult fields of laptop science engineering. A crew of researchers from MIT, NVIDIA, and Unbelievable AI Lab efficiently programmed a Frank Panda robotic arm with a Robotiq 2F140 parallel jaw gripper for rearranging objects in a scene to realize a desired object scene inserting relationship. The existence of many geometrically related rearrangement options for a given scene in the actual world shouldn’t be unusual, and researchers construct an answer utilizing an iterative pose de-noising coaching process.
The challenges confronted within the real-world scenes are fixing the current combinatorial variation in geometrical appearances and format, which provide many places and geometric options for object-scene interactions like inserting a guide in a half-filled rack or hanging mug within the mug stand. There could also be many scene places to position an object and these a number of potentialities result in difficulties in programming, studying, and deployment. The system must predict multi-modal outputs that span the entire foundation of doable rearrangements.
For a given ultimate object scene level clouds, the preliminary object configurations could be thought of as perturbations from which the rearrangement could be predicted by level cloud pose de-noising. A noised level cloud could be generated from the ultimate object-scene level cloud and randomly transferred to the preliminary configuration by coaching the mannequin utilizing neural networks. Multi-modality is ineffective for a given massive information because the mannequin tries to be taught a mean resolution that matches the information poorly. The analysis crew applied multi-step noising processes and diffusion fashions to beat this issue. The mannequin is educated as a diffusion mannequin and performs iterative de-noising.
Generalization to novel scene layouts is required after iterative de-noising. The analysis crew proposes to domestically encode the scene level cloud by cropping a area close to the thing. This helps the mannequin focus on the information set within the neighborhood by ignoring the non-local distant distractors. Inference process from random guess could result in an answer farther from a great resolution. Researchers resolve this by contemplating a bigger crop measurement initially and decreasing it upon a number of iterations to acquire a extra native scene context.
The analysis crew applied Relational Pose Diffusion (RPDiff) to carry out 6-DoF relational rearrangement conditioned on an object and scene level cloud. This generalizes throughout the assorted shapes, poses, and scene layouts with multi-modality. The motive they adopted is to iteratively de-noise the 6-DoF pose of the thing till it satisfies the specified geometrical relationship with the scene level cloud.
The analysis crew makes use of RPDiff to carry out relational rearrangement by way of pick-and-place on real-world objects and scenes. The mannequin is profitable in duties akin to inserting a guide on {a partially} crammed bookshelf, stacking a can on an open shelf, and hanging a mug on the rack with many hooks. Their mannequin can produce multi-modal distributions by overcoming multi-modal dataset becoming but additionally has limitations whereas engaged on pre-trained representations of information as their information for the demonstration was obtained solely from scripted insurance policies in simulation. Their work is expounded to different groups’ work on object rearrangement from notion by implementing Neural Form Mating (NSM).
Try the Paper, Project, and GitHub link. Don’t neglect to affix our 26k+ ML SubReddit, Discord Channel, and Email Newsletter, the place we share the newest AI analysis information, cool AI tasks, and extra. If in case you have any questions concerning the above article or if we missed something, be at liberty to electronic mail us at Asif@marktechpost.com
🚀 Check Out 800+ AI Tools in AI Tools Club
Arshad is an intern at MarktechPost. He’s at the moment pursuing his Int. MSc Physics from the Indian Institute of Know-how Kharagpur. Understanding issues to the basic stage results in new discoveries which result in development in expertise. He’s captivated with understanding the character basically with the assistance of instruments like mathematical fashions, ML fashions and AI.
[ad_2]
Source link
