

[ad_1]
Six-DoF (“diploma of freedom”) place monitoring and 3D reconstruction of an unknown object from a monocular RGBD video are two fundamental (and carefully associated) points in pc imaginative and prescient. Numerous functions in fields together with augmented actuality, robotic manipulation, learning-from-demonstration, and the sim-to-real switch can be doable by resolving these points. Earlier options often deal with these two points individually. As an illustration, neural scene representations have efficiently produced practical 3D object fashions.
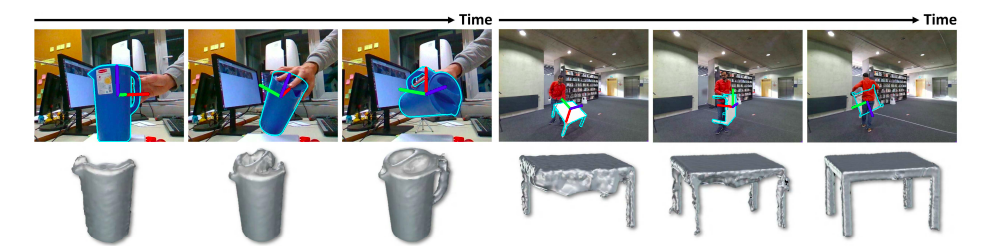
Nonetheless, these strategies depend on real-world merchandise masks and established digital camera positions. Full 3D reconstruction can be prevented when a always transferring digital camera captures a static object (e.g.,Determine 1 under: the underside of the factor is rarely seen if resting on a desk). Then again, textured 3D fashions of the check merchandise are often wanted prematurely for pre-training and on-line template matching, for instance-level, 6-DoF object place estimation and monitoring algorithms. Class-level procedures can generalize to new object situations that fall underneath the identical class. Nonetheless, they’ve bother with out-of-distribution instances and classes of objects which have but to be seen.
They counsel combining the options to those two points on this examine to get round these restrictions. Their methodology is conceptually much like earlier work in object-level SLAM. Their strategy requires a 2D object masks within the first body of the video and works on the idea that the merchandise is inflexible. The factor might transfer round freely through the video, even whereas being severely occluded, excluding these two situations. Nonetheless, they loosen up many presumptions, enabling us to take care of occlusion, specularity, a scarcity of visible texture and geometric cues, and abrupt object movement. A reminiscence pool to allow communication between the 2 techniques, an internet pose graph optimization mechanism, and a concurrent Neural Object Subject to rebuild the 3D kind and look are important parts of their strategy. In Determine 1, the resilience of their strategy is illustrated.
Researchers from NVIDIA proposed a recent strategy to 3-D reconstruction from a monocular RGBD video with 6-DoF object monitoring. The article within the first body should be segmented when utilizing their approach. Their approach can deal with troublesome conditions, together with fast movement, partial and full occlusion, absence of texture, and specular highlights, by using two concurrent threads that conduct on-line graph pose optimization and Neural Object Subject illustration, respectively. They’ve proven cutting-edge outcomes for a number of datasets in comparison with standard strategies. Future analysis will give attention to utilizing form priors to recreate hidden parts.
The next is a abstract of their contributions:
• A brand-new approach for 3D reconstruction and causal 6-DoF posture monitoring of an unique, unidentified dynamic object.
• They introduce a hybrid SDF illustration to take care of unsure free area brought on by the precise challenges in a dynamic object-centric setting, similar to noisy segmentation and exterior occlusions from the interplay.
• Experiments on three public benchmarks exhibit state-of-the-art efficiency towards present approaches.
Try the Paper and Project. All Credit score For This Analysis Goes To the Researchers on This Mission. Additionally, don’t neglect to affix our 17k+ ML SubReddit, Discord Channel, and Email Newsletter, the place we share the newest AI analysis information, cool AI tasks, and extra.
Aneesh Tickoo is a consulting intern at MarktechPost. He’s presently pursuing his undergraduate diploma in Information Science and Synthetic Intelligence from the Indian Institute of Expertise(IIT), Bhilai. He spends most of his time engaged on tasks aimed toward harnessing the facility of machine studying. His analysis curiosity is picture processing and is enthusiastic about constructing options round it. He loves to attach with individuals and collaborate on attention-grabbing tasks.
[ad_2]
Source link
