


[ad_1]
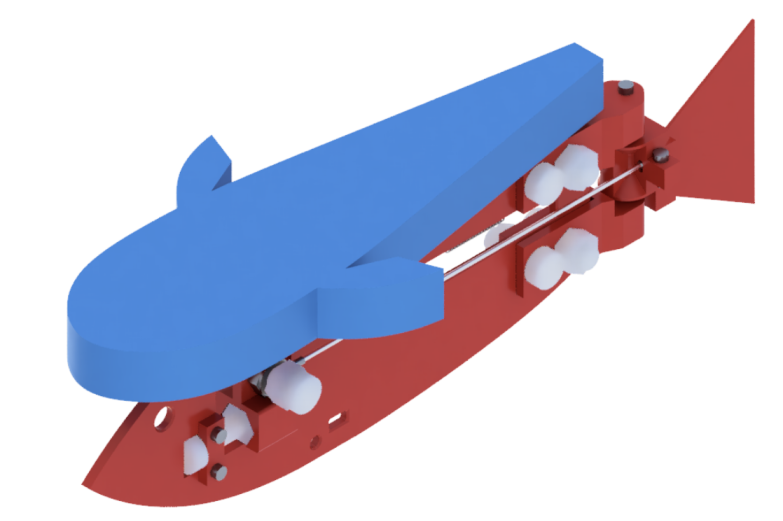
Robotic fish. Picture credit score: Tsam Lung You
The robotic fish was fitted with a twisted and coiled polymer (TCP) to drive it ahead, a lightweight low price gadget that depends on temperature change to generate motion, which additionally limits its pace.
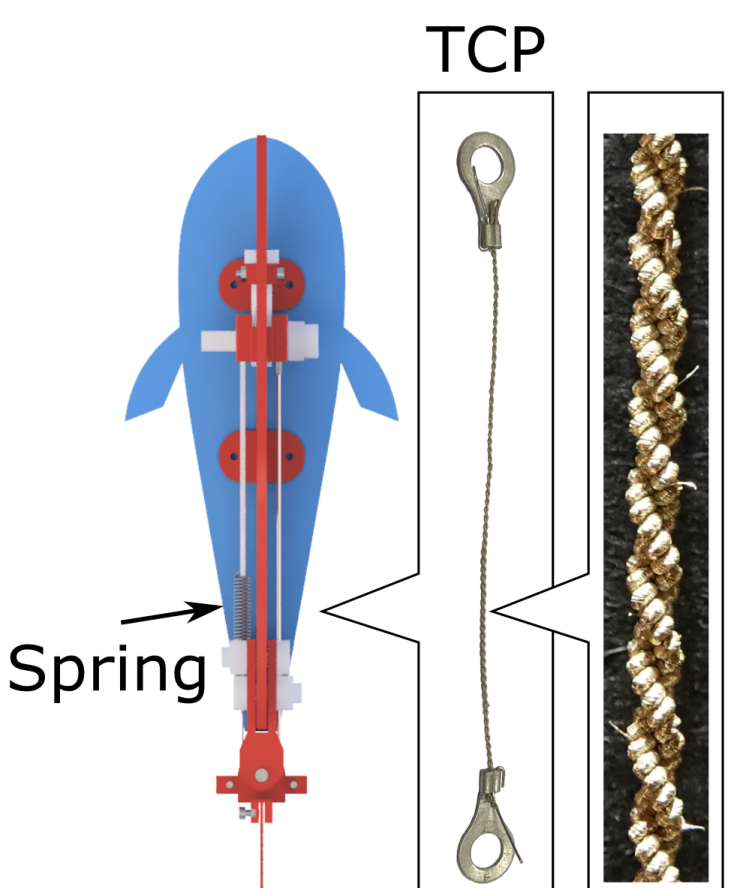
A TCP works by contracting like muscle tissue when heated, changing the power into mechanical movement. The TCP used on this work is warmed by Joule heating – the go of present by means of {an electrical} conductor produces thermal power and heats up the conductor. By minimising the space between the TCP on one facet of the robotic fish and the spring on the opposite, this prompts the fin on the rear, enabling the robotic fish to achieve new speeds. The undulating flapping of its rear fin was measured at a frequency of 2Hz, two waves per second. The frequency of the electrical present is similar because the frequency of tail flap.
The findings, revealed on the sixth IEEE-RAS Worldwide Convention on Gentle Robotics (RoboSoft 2023), present a brand new path to elevating the actuation – the motion of inflicting a machine or gadget to function – frequency of TCPs by means of thermomechanical design and reveals the potential for utilizing TCPs at excessive frequency in aqueous environments.
Lead writer Tsam Lung You from Bristol’s Department of Engineering Mathematics stated: “Twisted and coiled polymer (TCP) actuator is a promising novel actuator, exhibiting engaging properties of sunshine weight, low-cost excessive power density and easy fabrication course of.
“They are often produced from very simply assessable supplies comparable to a fishing line and so they contract and supply linear actuation when heated up. Nevertheless, due to the time wanted for warmth dissipation throughout the rest section, this makes them gradual.”
By optimising the structural design of the TCP-spring antagonistic muscle pair and bringing their anchor factors nearer collectively, it allowed the posterior fin to swing at a bigger angle for a similar quantity of TCP actuation.
Antagonistic muscle tissue. Picture credit score: Tsam Lung You
Though this requires better power, TCP is a powerful actuator with excessive work power density, and continues to be capable of drive the fin.
Till now, TCPs have been principally used for functions comparable to wearable units and robotic fingers. This work opens up extra areas of utility the place TCP can be utilized, comparable to marine robots for underwater exploration and monitoring.
Tsam Lung You added: “Our robotic fish swam on the quickest actuation frequency present in an actual TCP utility and in addition the very best locomotion pace of a TCP utility to this point.
“That is actually thrilling because it opens up extra alternatives of TCP utility in several areas.”
The crew now plan to increase the dimensions and develop a knifefish-inspired TCP-driven ribbon fin robotic that may swim agilely in water.

College of Bristol
is likely one of the hottest and profitable universities within the UK.
[ad_2]
Source link
