

[ad_1]

Birds are in a position to do lots due to their extremely versatile necks, whether or not it’s turning their heads round to groom their backs, wanting in many various instructions throughout flight, or accessing hard-to-reach nooks and crannies alongside the bottom or in timber. Amongst all avian species, the ostrich stands out as one chicken with a very sturdy and dexterous neck—qualities which are additionally interesting for robotic manipulators.
Utilizing an correct blueprint of the muscle tissues and tendons in an ostrich’s neck, researchers in Japan have created a novel robotic manipulator known as RobOstrich. They describe the gadget in a study printed 6 April in IEEE Robotics and Automation Letters.
Researchers are inquisitive about creating delicate and versatile robotic manipulators that might simply bend into hard-to-reach locations, however this comes with challenges. “From a robotics perspective, it’s tough to regulate such a construction,” explains Kazashi Nakano, a doctoral scholar on the Graduate School of Information Science and Technology at the University of Tokyo. “We targeted on the ostrich neck due to the opportunity of discovering one thing new.”
His group first dissected the neck of an ostrich to know the underlying community of tendons, muscle, and bone that helps manipulate such an extended and heavy physique half, which weighs in at a hefty 3 kilograms. Whereas a human has seven vertebrae within the neck, an ostrich has extra that double that. What’s extra, every cervical vertebra bends in two instructions, leading to extraordinarily excessive levels of freedom.
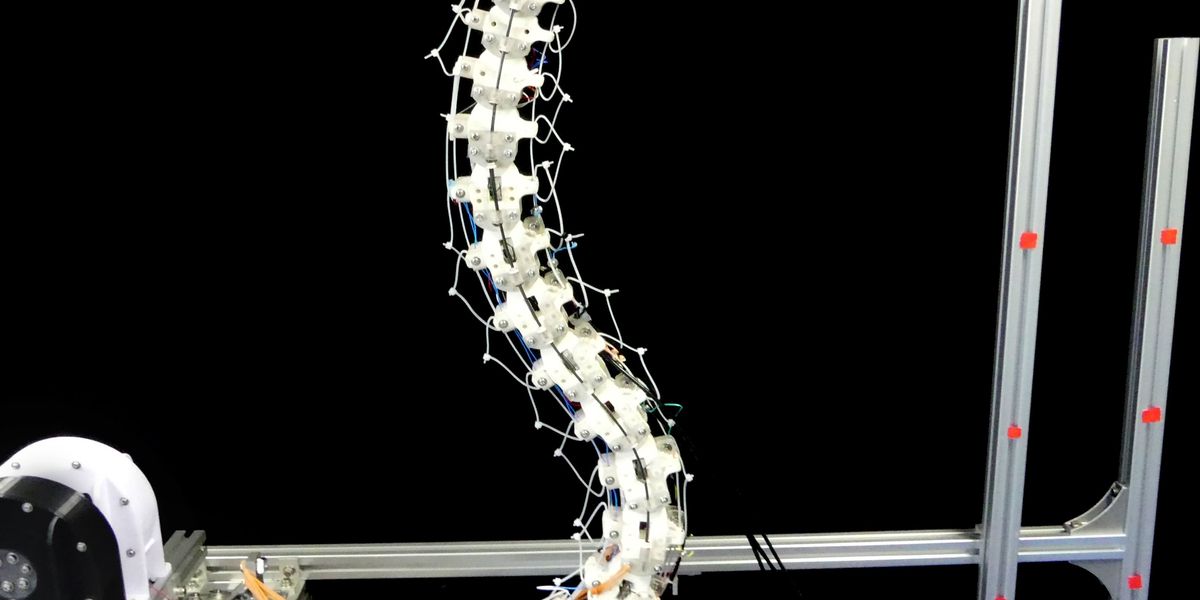
Utilizing this anatomical knowledge, the researchers set about creating their RobOstrich manipulator by 3-D printing 17 vertebrae, which they related with bearings. Bundles of piano wires have been used to imitate the organic muscle tissues between an ostrich’s vertebrae (intervertebral muscle tissues), and rubber bands have been used as ligaments on the base of the manipulator to offer rigidity. An electrical motor then reels within the wires, producing rigidity to “flex” the manipulator’s muscle tissues. In a collection of experiments, RobOstrich was in a position to full numerous reaching duties, the place it needed to obtain totally different configurations as a way to come into contact with an object.
IEEE Spectrum RobOstrich v3www.youtube.com
Similar to an actual ostrich neck, the RobOstrich manipulator achieved a “rolling sample,” the place adjoining joints transfer in sequence whereas the pinnacle stays degree with the bottom. Nakano says he was shocked to seek out that this motion sample could be achieved just by including rigidity to wires on simply the underside of the neck alone, whereas the size of the wire on the bottom stays fixed—that’s, it doesn’t should be pulled. On this means, the manipulator can obtain advanced configurations with minimal effort.
“The versatile construction is tough to regulate, however the benefit is that dexterous reaching actions could be achieved by introducing muscle preparations and joint ranges of movement primarily based on the ostrich’s anatomy,” says Nakano.
As at the moment configured, RobOstrich can solely transfer ahead on a 2D aircraft, however the researchers hope to realize 3D motion sooner or later.
“We purpose to develop a controller that may carry out reaching actions in an unstructured setting whereas colliding gently with it,” says Nakano.
In the meantime, RobOstrich is just not the one ostrich-inspired robotic making headlines. Ostriches may also run at astounding speeds—protecting 100 meters in simply 5 seconds. Impressed by this feat, researchers at Oregon State University created Cassie, a two-legged speedster. Final September, Cassie set new information for the quickest bipedal robotic; you may watch the video here.
From Your Website Articles
Associated Articles Across the Net
[ad_2]
Source link
