

[ad_1]

We’ve gotten used to considering of quadrupedal robots as robotic variations of canine. And, to be truthful, it’s proper there within the phrase “quadrupedal.” But when we will simply get previous the Latin, there’s completely no purpose why quadrupedal robots have to limit themselves to utilizing all 4 of their limbs as legs the entire time. And in reality, most different quadrupeds are versatile like this: four-legged animals ceaselessly use their entrance limbs to work together with the world round them for non-locomotion functions.
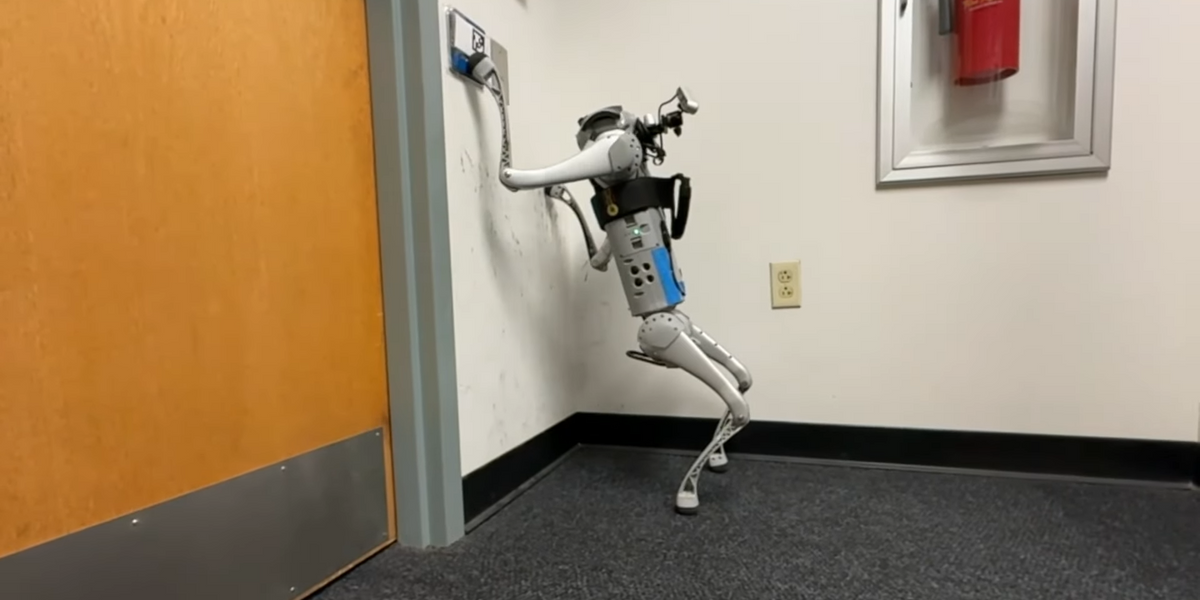
Roboticists at CMU and UC Berkeley are training robot dogs to use their legs for manipulation, not simply locomotion, demonstrating expertise that embody climbing partitions, urgent buttons, and even kicking a soccer ball.
Coaching a robotic to do each locomotion and manipulation on the similar time with the identical limbs may be difficult utilizing reinforcement studying methods, as a result of you will get caught in local minima whereas attempting to optimize for expertise which are very totally different and (I might guess) typically in opposition to one another. So, the researchers cut up the coaching into separate manipulation and locomotion insurance policies, and skilled every in simulation, though that meant an additional step smooshing these separate expertise collectively in the true world to carry out helpful duties.
Efficiently performing a mixed locomotion and manipulation activity requires one high-quality skilled demonstration. The robotic remembers what instructions the human gave through the demonstration, after which creates a conduct tree that it will probably comply with that breaks up the duties right into a bunch of linked locomotion and manipulation sub-tasks that it will probably carry out so as. This additionally provides robustness to the system, as a result of if the robotic fails any sub-task, it will probably “rewind” its method again by the conduct tree till it will get again to a degree of success, after which begin over from there.
This explicit robotic (a Unitree Go1 with an Intel RealSense for notion) manages to stability itself towards a wall to press a wheelchair entry button that’s almost a meter excessive, after which stroll out the open door, which is fairly spectacular. Extra broadly, this can be a helpful step in direction of serving to non-humanoid robots to function in human-optimized environments, which is perhaps extra necessary than it appears. It’s definitely attainable to switch our environments to be friendlier to robots, and we see this in locations like hospitals (and a few resorts) the place robots are capable of immediately management elevators. This makes it a lot simpler for the robots to get round, however it’s annoying sufficient to have to try this in some instances, it’s extra sensible (if not essentially easier) to just build a button-pushing robot instead. There’s maybe an argument to be made that the perfect center floor right here is simply to construct broadly accessible infrastructure within the first place, by ensuring that neither robots nor people ought to must depend on a selected manipulation approach to function something. However till we make that occur, expertise like these can be crucial for useful legged robots.
Legs as Manipulator: Pushing Quadrupedal Agility Beyond Locomotion, by Xuxin Cheng, Ashish Kumar, and Deepak Pathak from Carnegie Mellon College and UC Berkeley, can be offered subsequent month at ICRA 2023 in London.
From Your Website Articles
Associated Articles Across the Internet
[ad_2]
Source link
