

[ad_1]
Path attribution strategies are a gradient-based manner
of explaining deep fashions. These strategies require selecting a
hyperparameter often known as the baseline enter.
What does this hyperparameter imply, and the way vital is it? On this article,
we examine these questions utilizing picture classification networks
as a case research. We focus on a number of alternative ways to decide on a baseline
enter and the assumptions which can be implicit in every baseline.
Though we focus right here on path attribution strategies, our dialogue of baselines
is carefully linked with the idea of missingness within the characteristic area –
an idea that’s vital to interpretability analysis.
Introduction
If you’re within the enterprise of coaching neural networks,
you may need heard of the built-in gradients technique, which
was launched at
ICML two years in the past
The tactic computes which options are vital
to a neural community when making a prediction on a
specific knowledge level. This helps customers
perceive which options their community depends on.
Since its introduction,
built-in gradients has been used to interpret
networks educated on quite a lot of knowledge varieties,
together with retinal fundus photos
and electrocardiogram recordings
In the event you’ve ever used built-in gradients,
you realize that you want to outline a baseline enter (x’) earlier than
utilizing the strategy. Though the unique paper discusses the necessity for a baseline
and even proposes a number of completely different baselines for picture knowledge – together with
the fixed black picture and a picture of random noise – there may be
little current analysis in regards to the affect of this baseline.
Is built-in gradients delicate to the
hyperparameter selection? Why is the fixed black picture
a “pure baseline” for picture knowledge? Are there any various decisions?
On this article, we are going to delve into how this hyperparameter selection arises,
and why understanding it will be significant if you find yourself doing mannequin interpretation.
As a case-study, we are going to give attention to picture classification fashions so as
to visualise the results of the baseline enter. We are going to discover a number of
notions of missingness, together with each fixed baselines and baselines
outlined by distributions. Lastly, we are going to focus on alternative ways to match
baseline decisions and discuss why quantitative analysis
stays a troublesome downside.
Picture Classification
We give attention to picture classification as a activity, as it’s going to enable us to visually
plot built-in gradients attributions, and evaluate them with our instinct
about which pixels we predict needs to be vital. We use the Inception V4 structure
neural community designed for the ImageNet dataset
during which the duty is to find out which class a picture belongs to out of 1000 lessons.
On the ImageNet validation set, Inception V4 has a top-1 accuracy of over 80%.
We obtain weights from TensorFlow-Slim
and visualize the predictions of the community on 4 completely different photos from the
validation set.
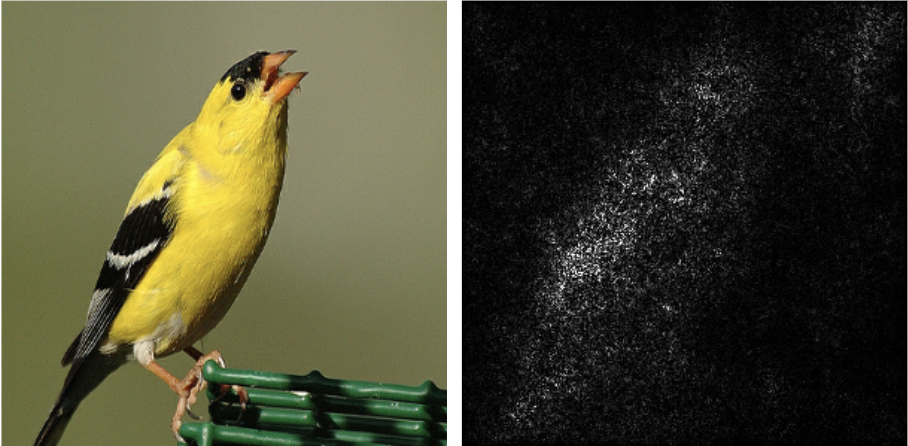
community appropriately classifies all photos with excessive confidence.
Left: Pixel-wise attributions of the Inception V4 community utilizing built-in gradients.
You may discover that some attributions spotlight pixels that don’t appear vital
relative to the true class label.
Though cutting-edge fashions carry out properly on unseen knowledge,
customers should be left questioning: how did the mannequin determine
out which object was within the picture? There are a myriad of strategies to
interpret machine studying fashions, together with strategies to
visualize and perceive how the community represents inputs internally
characteristic attribution strategies that assign an significance rating to every characteristic
for a selected enter
and saliency strategies that goal to spotlight which areas of a picture
the mannequin was when making a call
These classes will not be mutually unique: for instance, an attribution technique may be
visualized as a saliency technique, and a saliency technique can assign significance
scores to every particular person pixel. On this article, we are going to focus
on the characteristic attribution technique built-in gradients.
Formally, given a goal enter (x) and a community perform (f),
characteristic attribution strategies assign an significance rating (phi_i(f, x))
to the (i)th characteristic worth representing how a lot that characteristic
provides or subtracts from the community output. A big optimistic or unfavorable (phi_i(f, x))
signifies that characteristic strongly will increase or decreases the community output
(f(x)) respectively, whereas an significance rating near zero signifies that
the characteristic in query didn’t affect (f(x)).
In the identical determine above, we visualize which pixels have been most vital to the community’s appropriate
prediction utilizing built-in gradients.
The pixels in white point out extra vital pixels. As a way to plot
attributions, we comply with the identical design decisions as
That’s, we plot absolutely the worth of the sum of characteristic attributions
throughout the channel dimension, and cap characteristic attributions on the 99th percentile to keep away from
high-magnitude attributions dominating the colour scheme.
A Higher Understanding of Built-in Gradients
As you look by the attribution maps, you may discover a few of them
unintuitive. Why does the attribution for “goldfinch” spotlight the inexperienced background?
Why doesn’t the attribution for “killer whale” spotlight the black elements of the killer whale?
To raised perceive this conduct, we have to discover how
we generated characteristic attributions. Formally, built-in gradients
defines the significance worth for the (i)th characteristic worth as follows:
$$phi_i^{IG}(f, x, x’) = overbrace{(x_i – x’_i)}^{textual content{Distinction from baseline}}
occasions underbrace{int_{alpha = 0}^ 1}_{textual content{From baseline to enter…}}
overbrace{frac{delta f(x’ + alpha (x – x’))}{delta x_i} d alpha}^{textual content{…accumulate native gradients}}
$$
the place (x) is the present enter,
(f) is the mannequin perform and (x’) is a few baseline enter that’s meant to signify
“absence” of characteristic enter. The subscript (i) is used
to indicate indexing into the (i)th characteristic.
Because the components above states, built-in gradients will get significance scores
by accumulating gradients on photos interpolated between the baseline worth and the present enter.
However why would doing this make sense? Recall that the gradient of
a perform represents the course of most improve. The gradient
is telling us which pixels have the steepest native slope with respect
to the output. For that reason, the gradient of a community on the enter
was one of many earliest saliency strategies.
Sadly, there are various issues with utilizing gradients to interpret
deep neural networks
One particular problem is that neural networks are vulnerable to an issue
often known as saturation: the gradients of enter options might have small magnitudes round a
pattern even when the community relies upon closely on these options. This will occur
if the community perform flattens after these options attain a sure magnitude.
Intuitively, shifting the pixels in a picture by a small quantity usually
doesn’t change what the community sees within the picture. We are able to illustrate
saturation by plotting the community output in any respect
photos between the baseline (x’) and the present picture. The determine
beneath shows that the community
output for the proper class will increase initially, however then rapidly flattens.
Discover that the community output saturates the proper class
at small values of (alpha). By the point (alpha = 1),
the community output barely adjustments.
What we actually wish to know is how our community acquired from
predicting primarily nothing at (x’) to being
fully saturated in direction of the proper output class at (x).
Which pixels, when scaled alongside this path, most
elevated the community output for the proper class? That is
precisely what the components for built-in gradients offers us.
By integrating over a path,
built-in gradients avoids issues with native gradients being
saturated. We are able to break the unique equation
down and visualize it in three separate elements: the interpolated picture between
the baseline picture and the goal picture, the gradients on the interpolated
picture, and accumulating many such gradients over (alpha).
$$
int_{alpha’ = 0}^{alpha} underbrace{(x_i – x’_i) occasions
frac{delta f(textual content{ }overbrace{x’ + alpha’ (x – x’)}^{textual content{(1): Interpolated Picture}}textual content{ })}
{delta x_i} d alpha’}_{textual content{(2): Gradients at Interpolation}}
= overbrace{phi_i^{IG}(f, x, x’; alpha)}^{textual content{(3): Cumulative Gradients as much as }alpha}
$$
We visualize these three items of the components beneath.
approximation of the integral with 500 linearly-spaced factors between 0 and 1.
equation (4) and the blue line refers to (f(x) – f(x’)). Discover how excessive magnitude gradients
accumulate at small values of (alpha).
Now we have casually omitted one a part of the components: the very fact
that we multiply by a distinction from a baseline. Though
we received’t go into element right here, this time period falls out as a result of we
care in regards to the spinoff of the community
perform (f) with respect to the trail we’re integrating over.
straight-line between (x’) and (x), which
we are able to signify as (gamma(alpha) =
x’ + alpha(x – x’)), then:
$$
frac{delta f(gamma(alpha))}{delta alpha} =
frac{delta f(gamma(alpha))}{delta gamma(alpha)} occasions
frac{delta gamma(alpha)}{delta alpha} =
frac{delta f(x’ + alpha’ (x – x’))}{delta x_i} occasions (x_i – x’_i)
$$
The distinction from baseline time period is the spinoff of the
path perform (gamma) with respect to (alpha).
in additional element within the authentic paper. Specifically, the authors
present that built-in gradients satisfies a number of fascinating
properties, together with the completeness axiom:
$$
textrm{Axiom 1: Completeness}
sum_i phi_i^{IG}(f, x, x’) = f(x) – f(x’)
$$
Notice that this theorem holds for any baseline (x’).
Completeness is a fascinating property as a result of it states that the
significance scores for every characteristic break down the output of the community:
every significance rating represents that characteristic’s particular person contribution to
the community output, and added when collectively, we get better the output worth itself.
that built-in gradients satisfies this axiom utilizing the
fundamental
theorem of calculus for path integrals. We go away a
full dialogue of all the properties that built-in
gradients satisfies to the unique paper, since they maintain
unbiased of the selection of baseline.
axiom additionally gives a approach to measure convergence.
In follow, we are able to’t compute the precise worth of the integral. As a substitute,
we use a discrete sum approximation with (okay) linearly-spaced factors between
0 and 1 for some worth of (okay). If we solely selected 1 level to
approximate the integral, that looks like too few. Is 10 sufficient? 100?
Intuitively 1,000 might appear to be sufficient, however can we make sure?
As proposed within the authentic paper, we are able to use the completeness axiom
as a sanity verify on convergence: run built-in gradients with (okay)
factors, measure (|sum_i phi_i^{IG}(f, x, x’) – (f(x) – f(x’))|),
and if the distinction is massive, re-run with a bigger (okay)
In fact, this brings up a brand new query: what’s “massive” on this context?
One heuristic is to match the distinction with the magnitude of the
output itself.
The road chart above plots the next equation in purple:
$$
underbrace{sum_i phi_i^{IG}(f, x, x’; alpha)}_{textual content{(4): Sum of Cumulative Gradients as much as }alpha}
$$
That’s, it sums all the pixel attributions within the saliency map.
This lets us evaluate to the blue line, which plots (f(x) – f(x’)).
We are able to see that with 500 samples, we appear (at the least intuitively) to
have converged. However this text isn’t about how
to get good convergence – it’s about baselines! So as
to advance our understanding of the baseline, we are going to want a short tour
into the world of recreation principle.
Recreation Concept and Missingness
Built-in gradients is impressed by work
from cooperative recreation principle, particularly the Aumann-Shapley worth
a non-atomic recreation is a development used to mannequin large-scale financial methods
the place there are sufficient contributors that it’s fascinating to mannequin them repeatedly.
Aumann-Shapley values present a theoretically grounded approach to
decide how a lot completely different teams of contributors contribute to the system.
In recreation principle, a notion of missingness is well-defined. Video games are outlined
on coalitions – units of contributors – and for any particular coalition,
a participant of the system may be in or out of that coalition. The actual fact
that video games may be evaluated on coalitions is the muse of
the Aumann-Shapley worth. Intuitively, it computes how
a lot worth a gaggle of contributors provides to the sport
by computing how a lot the worth of the sport would improve
if we added extra of that group to any given coalition.
Sadly, missingness is a harder notion when
we’re talking about machine studying fashions. So as
to judge how vital the (i)th characteristic is, we
need to have the ability to compute how a lot the output of
the community would improve if we successively elevated
the “presence” of the (i)th characteristic. However what does this imply, precisely?
As a way to improve the presence of a characteristic, we would want to start out
with the characteristic being “lacking” and have a manner of interpolating
between that missingness and its present, identified worth.
Hopefully, that is sounding awfully acquainted. Built-in gradients
has a baseline enter (x’) for precisely this motive: to mannequin a
characteristic being absent. However how do you have to select
(x’) in an effort to finest signify this? It appears to be frequent follow
to decide on a baseline enter (x’) to be the vector of
all zeros. However think about the next situation: you’ve realized a mannequin
on a healthcare dataset, and one of many options is blood sugar stage.
The mannequin has appropriately realized that excessively low ranges of blood sugar,
which correspond to hypoglycemia, is harmful. Does
a blood sugar stage of (0) appear to be a good selection to signify missingness?
The purpose right here is that fastened characteristic values might have unintended that means.
The issue compounds additional when you think about the distinction from
baseline time period (x_i – x’_i).
For the sake of a thought experiment, suppose a affected person had a blood sugar stage of (0).
To grasp why our machine studying mannequin thinks this affected person
is at excessive danger, you run built-in gradients on this knowledge level with a
baseline of the all-zeros vector. The blood sugar stage of the affected person would have (0) characteristic significance,
as a result of (x_i – x’_i = 0). That is even though
a blood sugar stage of (0) could be deadly!
We discover comparable issues after we transfer to the picture area.
In the event you use a relentless black picture as a baseline, built-in gradients will
not spotlight black pixels as vital even when black pixels make up
the article of curiosity. Extra usually, the strategy is blind to the colour you utilize as a baseline, which
we illustrate with the determine beneath. Notice that this was acknowledged by the unique
authors in
central to the definition of a baseline: we wouldn’t need built-in gradients
to spotlight lacking options as vital! However then how can we keep away from
giving zero significance to the baseline coloration?
as a baseline enter (x’). Discover that pixels
of the baseline coloration will not be highlighted as vital,
even when they make up a part of the principle object within the picture.
Different Baseline Selections
It’s clear that any fixed coloration baseline can have this downside.
Are there any options? On this part, we
evaluate 4 various decisions for a baseline within the picture area.
Earlier than continuing, it’s vital to notice that this text isn’t
the primary article to level out the issue of selecting a baselines.
A number of articles, together with the unique paper, focus on and evaluate
a number of notions of “missingness”, each within the
context of built-in gradients and extra usually
Nonetheless, selecting the best baseline stays a problem. Right here we are going to
current a number of decisions for baselines: some primarily based on current literature,
others impressed by the issues mentioned above. The determine on the finish
of the part visualizes the 4 baselines offered right here.
The Most Distance Baseline
If we’re nervous about fixed baselines which can be blind to the baseline
coloration, can we explicitly assemble a baseline that doesn’t endure from this
downside? One apparent approach to assemble such a baseline is to take the
farthest picture in L1 distance from the present picture such that the
baseline remains to be within the legitimate pixel vary. This baseline, which
we are going to seek advice from as the utmost distance baseline (denoted
max dist. within the determine beneath),
avoids the distinction from baseline problem immediately.
The Blurred Baseline
The difficulty with the utmost distance baseline is that it doesn’t
actually signify missingness. It truly incorporates numerous
details about the unique picture, which suggests we’re now not
explaining our prediction relative to a lack of awareness. To raised
protect the notion of missingness, we take inspiration from
Fong and Vedaldi use a blurred model of the picture as a
domain-specific approach to signify lacking info. This baseline
is engaging as a result of it captures the notion of missingness in photos
in a really human intuitive manner. Within the determine beneath, this baseline is
denoted blur. The determine permits you to play with the smoothing fixed
used to outline the baseline.
The Uniform Baseline
One potential downside with the blurred baseline is that it’s biased
to spotlight high-frequency info. Pixels which can be very comparable
to their neighbors might get much less significance than pixels which can be very
completely different than their neighbors, as a result of the baseline is outlined as a weighted
common of a pixel and its neighbors. To beat this, we are able to once more take inspiration
from each
gradients paper. One other approach to outline missingness is to easily pattern a random
uniform picture within the legitimate pixel vary and name that the baseline.
We seek advice from this baseline because the uniform baseline within the determine beneath.
The Gaussian Baseline
In fact, the uniform distribution isn’t the one distribution we are able to
draw random noise from. Of their paper discussing the SmoothGrad (which we are going to
contact on within the subsequent part), Smilkov et al.
make frequent use of a gaussian distribution centered on the present picture with
variance (sigma). We are able to use the identical distribution as a baseline for
built-in gradients! Within the determine beneath, this baseline is named the gaussian
baseline. You’ll be able to differ the usual deviation of the distribution (sigma) utilizing the slider.
One factor to notice right here is that we truncate the gaussian baseline within the legitimate pixel
vary, which signifies that as (sigma) approaches (infty), the gaussian
baseline approaches the uniform baseline.
baselines, you may differ the parameter (sigma), which refers
to the width of the smoothing kernel and the usual deviation of
noise respectively.
Averaging Over A number of Baselines
You might have nagging doubts about these final two baselines, and also you
could be proper to have them. A randomly generated baseline
can endure from the identical blindness downside {that a} fixed picture can. If
we draw a uniform random picture as a baseline, there’s a small probability
{that a} baseline pixel shall be very near its corresponding enter pixel
in worth. These pixels won’t be highlighted as vital. The ensuing
saliency map might have artifacts as a result of randomly drawn baseline. Is there
any manner we are able to repair this downside?
Maybe probably the most pure manner to take action is to common over a number of
completely different baselines, as mentioned in
Though doing so might not be notably pure for fixed coloration photos
(which colours do you select to common over and why?), it’s a
very pure notion for baselines drawn from distributions. Merely
draw extra samples from the identical distribution and common the
significance scores from every pattern.
Assuming a Distribution
At this level, it’s price connecting the concept of averaging over a number of
baselines again to the unique definition of built-in gradients. When
we common over a number of baselines from the identical distribution (D),
we are trying to make use of the distribution itself as our baseline.
We use the distribution to outline the notion of missingness:
if we don’t know a pixel worth, we don’t assume its worth to be 0 – as an alternative
we assume that it has some underlying distribution (D). Formally, given
a baseline distribution (D), we combine over all potential baselines
(x’ in D) weighted by the density perform (p_D):
$$ phi_i(f, x) = underbrace{int_{x’}}_{textual content{Combine over baselines…}} bigg( overbrace{phi_i^{IG}(f, x, x’
)}^{textual content{built-in gradients
with baseline } x’
} occasions underbrace{p_D(x’) dx’}_{textual content{…and weight by the density}} bigg)
$$
By way of missingness, assuming a distribution may intuitively really feel
like a extra cheap assumption to make than assuming a relentless worth.
However this doesn’t fairly clear up the problem: as an alternative of getting to decide on a baseline
(x’), now we’ve got to decide on a baseline distribution (D). Have we merely
postponed the issue? We are going to focus on one theoretically motivated
manner to decide on (D) in an upcoming part, however earlier than we do, we’ll take
a short apart to speak about how we compute the components above in follow,
and a connection to an current technique that arises consequently.
Expectations, and Connections to SmoothGrad
Now that we’ve launched a second integral into our components,
we have to do a second discrete sum to approximate it, which
requires a further hyperparameter: the variety of baselines to pattern.
In
remark that each integrals may be considered expectations:
the primary integral as an expectation over (D), and the second integral
as an expectation over the trail between (x’) and (x). This formulation,
known as anticipated gradients, is outlined formally as:
$$ phi_i^{EG}(f, x; D) = underbrace{mathop{mathbb{E}}_{x’ sim D, alpha sim U(0, 1)}}_
{textual content{Expectation over (D) and the trail…}}
bigg[ overbrace{(x_i – x’_i) times
frac{delta f(x’ + alpha (x – x’))}{delta x_i}}^{text{…of the
importance of the } itext{th pixel}} bigg]
$$
Anticipated gradients and built-in gradients belong to a household of strategies
often known as “path attribution strategies” as a result of they combine gradients
over a number of paths between two legitimate inputs.
Each anticipated gradients and built-in gradients use straight-line paths,
however one can combine over paths that aren’t straight as properly. That is mentioned
in additional element within the authentic paper.
follow, we use the next components:
$$
hat{phi}_i^{EG}(f, x; D) = frac{1}{okay} sum_{j=1}^okay (x_i – x’^j_i) occasions
frac{delta f(x’^j + alpha^{j} (x – x’^j))}{delta x_i}
$$
the place (x’^j) is the (j)th pattern from (D) and
(alpha^j) is the (j)th pattern from the uniform distribution between
0 and 1. Now suppose that we use the gaussian baseline with variance
(sigma^2). Then we are able to re-write the components for anticipated gradients as follows:
$$
hat{phi}_i^{EG}(f, x; N(x, sigma^2 I))
= frac{1}{okay} sum_{j=1}^okay
epsilon_{sigma}^{j} occasions
frac{delta f(x + (1 – alpha^j)epsilon_{sigma}^{j})}{delta x_i}
$$
the place (epsilon_{sigma} sim N(bar{0}, sigma^2 I))
To see how we arrived
on the above components, first observe that
$$
start{aligned}
x’ sim N(x, sigma^2 I) &= x + epsilon_{sigma}
x’- x &= epsilon_{sigma}
finish{aligned}
$$
by definition of the gaussian baseline. Now we’ve got:
$$
start{aligned}
x’ + alpha(x – x’) &=
x + epsilon_{sigma} + alpha(x – (x + epsilon_{sigma})) &=
x + (1 – alpha)epsilon_{sigma}
finish{aligned}
$$
The above components merely substitues the final line
of every equation block again into the components.
This seems awfully acquainted to an current technique known as SmoothGrad
variant of SmoothGrad
was a way designed to sharpen saliency maps and was meant to be run
on prime of an current saliency technique. The concept is straightforward:
as an alternative of operating a saliency technique as soon as on a picture, first
add some gaussian noise to a picture, then run the saliency technique.
Do that a number of occasions with completely different attracts of gaussian noise, then
common the outcomes. Multipying the gradients by the enter and utilizing that as a saliency map
is mentioned in additional element within the authentic SmoothGrad paper.
then we’ve got the next components:
$$
phi_i^{SG}(f, x; N(bar{0}, sigma^2 I))
= frac{1}{okay} sum_{j=1}^okay
(x + epsilon_{sigma}^{j}) occasions
frac{delta f(x + epsilon_{sigma}^{j})}{delta x_i}
$$
We are able to see that SmoothGrad and anticipated gradients with a
gaussian baseline are fairly comparable, with two key variations:
SmoothGrad multiplies the gradient by (x + epsilon_{sigma}) whereas anticipated
gradients multiplies by simply (epsilon_{sigma}), and whereas anticipated
gradients samples uniformly alongside the trail, SmoothGrad at all times
samples the endpoint (alpha = 0).
Can this connection assist us perceive why SmoothGrad creates
smooth-looking saliency maps? After we assume the above gaussian distribution as our baseline, we’re
assuming that every of our pixel values is drawn from a
gaussian independently of the opposite pixel values. However we all know
that is removed from true: in photos, there’s a wealthy correlation construction
between close by pixels. As soon as your community is aware of the worth of a pixel,
it doesn’t really want to make use of its instant neighbors as a result of
it’s possible that these instant neighbors have very comparable intensities.
Assuming every pixel is drawn from an unbiased gaussian
breaks this correlation construction. It signifies that anticipated gradients
tabulates the significance of every pixel independently of
the opposite pixel values. The generated saliency maps
shall be much less noisy and higher spotlight the article of curiosity
as a result of we’re now not permitting the community to rely
on solely pixel in a gaggle of correlated pixels. This can be
why SmoothGrad is {smooth}: as a result of it’s implicitly assuming
independence amongst pixels. Within the determine beneath, you may evaluate
built-in gradients with a single randomly drawn baseline
to anticipated gradients sampled over a distribution. For
the gaussian baseline, you can too toggle the SmoothGrad
possibility to make use of the SmoothGrad components above. For all figures,
(okay=500).
baselines from the identical distribution. Use the
“Multi-Reference” button to toggle between the 2. For the gaussian
baseline, you can too toggle the “Easy Grad” button
to toggle between anticipated gradients and SmoothGrad
with gradients * inputs.
Utilizing the Coaching Distribution
Is it actually cheap to imagine independence amongst
pixels whereas producing saliency maps? In supervised studying,
we make the idea that the information is drawn
from some distribution (D_{textual content{knowledge}}). This assumption that the coaching and testing knowledge
share a typical, underlying distribution is what permits us to
do supervised studying and make claims about generalizability. Given
this assumption, we don’t have to
mannequin missingness utilizing a gaussian or a uniform distribution:
we are able to use (D_{textual content{knowledge}}) to mannequin missingness immediately.
The one downside is that we don’t have entry to the underlying distribution.
However as a result of this can be a supervised studying activity, we do have entry to many
unbiased attracts from the underlying distribution: the coaching knowledge!
We are able to merely use samples from the coaching knowledge as random attracts
from (D_{textual content{knowledge}}). This brings us to the variant
of anticipated gradients utilized in
which we once more visualize in three elements:
$$
frac{1}{okay} sum_{j=1}^okay
underbrace{(x_i – x’^j_i) occasions
frac{delta f(textual content{ }
overbrace{x’^j + alpha^{j} (x – x’^j)}^{textual content{(1): Interpolated Picture}}
textual content{ })}{delta x_i}}_{textual content{ (2): Gradients at Interpolation}}
= overbrace{hat{phi_i}^{EG}(f, x, okay; D_{textual content{knowledge}})}
^{textual content{(3): Cumulative Gradients as much as }alpha}
$$
from a single path, anticipated gradients averages contributions from
all paths outlined by the underlying knowledge distribution. Notice that
this determine solely shows each tenth pattern to keep away from loading many photos.
In (4) we once more plot the sum of the significance scores over pixels. As talked about
within the authentic built-in gradients paper, all path strategies, together with anticipated
gradients, fulfill the completeness axiom. We are able to positively see that
completeness is tougher to fulfill after we combine over each a path
and a distribution: that’s, with the identical quantity
of samples, anticipated gradients doesn’t converge as rapidly as
built-in gradients does. Whether or not or not that is a suitable worth to
pay to keep away from color-blindness in attributions appears subjective.
Evaluating Saliency Strategies
So we now have many various decisions for a baseline. How can we select
which one we must always use? The completely different decisions of distributions and fixed
baselines have completely different theoretical motivations and sensible considerations.
Do we’ve got any manner of evaluating the completely different baselines? On this part,
we are going to contact on a number of completely different concepts about tips on how to evaluate
interpretability strategies. This part isn’t meant to be a complete overview
of all the current analysis metrics, however is as an alternative meant to
emphasize that evaluating interpretability strategies stays a troublesome downside.
The Risks of Qualitative Evaluation
One naive approach to consider our baselines is to take a look at the saliency maps
they produce and see which of them finest spotlight the article within the picture.
From our earlier figures, it does appear to be utilizing (D_{textual content{knowledge}}) produces
cheap outcomes, as does utilizing a gaussian baseline or the blurred baseline.
However is visible inspection actually a great way decide our baselines? For one factor,
we’ve solely offered 4 photos from the check set right here. We would want to
conduct person research on a a lot bigger scale with extra photos from the check
set to be assured in our outcomes. However even with large-scale person research,
qualitative evaluation of saliency maps has different drawbacks.
After we depend on qualitative evaluation, we’re assuming that people
know what an “correct” saliency map is. After we take a look at saliency maps
on knowledge like ImageNet, we frequently verify whether or not or not the saliency map
highlights the article that we see as representing the true class within the picture.
We make an assumption between the information and the label, after which additional assume
{that a} good saliency map ought to mirror that assumption. However doing so
has no actual justification. Think about the determine beneath, which compares
two saliency strategies on a community that will get above 99% accuracy
on (an altered model of) MNIST.
The primary saliency technique is simply an edge detector plus gaussian smoothing,
whereas the second saliency technique is predicted gradients utilizing the coaching
knowledge as a distribution. Edge detection higher displays what we people
assume is the connection between the picture and the label.
on our human information of the connection between
the information and the labels, after which we assume
that an correct mannequin has realized that very relationship.
Sadly, the sting detection technique right here doesn’t spotlight
what the community has realized. This dataset is a variant of
decoy MNIST, during which the highest left nook of the picture has
been altered to immediately encode the picture’s class
of the highest left nook of every picture has been altered to
be (255 occasions frac{y}{9} ) the place (y) is the category
the picture belongs to. We are able to confirm by eradicating this
patch within the check set that the community closely depends on it to make
predictions, which is what the anticipated gradients saliency maps present.
That is clearly a contrived instance. Nonetheless, the truth that
visible evaluation isn’t essentially a helpful approach to consider
saliency maps and attribution strategies has been extensively
mentioned in latest literature, with many proposed qualitative
exams as replacements
On the coronary heart of the problem is that we don’t have floor reality explanations:
we are attempting to judge which strategies finest clarify our community with out
truly understanding what our networks are doing.
Prime Ok Ablation Exams
One easy approach to consider the significance scores that
anticipated/built-in gradients produces is to see whether or not
ablating the highest okay options as ranked by their significance
decreases the anticipated output logit. Within the determine beneath, we
ablate both by mean-imputation or by changing every pixel
by its gaussian-blurred counter-part (Imply Prime Ok and Blur Prime Ok within the plot). We generate pixel importances
for 1000 completely different appropriately labeled test-set photos utilizing every
of the baselines proposed above
For the blur baseline and the blur
ablation check, we use (sigma = 20).
For the gaussian baseline, we use (sigma = 1). These decisions
are considerably arbitrary – a extra complete analysis
would evaluate throughout many values of (sigma).
management, we additionally embody rating options randomly
(Random Noise within the plot).
We plot, as a fraction of the unique logit, the output logit
of the community on the true class. That’s, suppose the unique
picture is a goldfinch and the community predicts the goldfinch class appropriately
with 95% confidence. If the boldness of sophistication goldfinch drops
to 60% after ablating the highest 10% of pixels as ranked by
characteristic significance, then we plot a curve that goes by
the factors ((0.0, 0.95)) and ((0.1, 0.6)). The baseline selection
that finest highlights which pixels the community
ought to exhibit the quickest drop in logit magnitude, as a result of
it highlights the pixels that the majority improve the boldness of the community.
That’s, the decrease the curve, the higher the baseline.
Mass Heart Ablation Exams
One downside with ablating the highest okay options in a picture
is expounded to a problem we already introduced up: characteristic correlation.
Regardless of how we ablate a pixel, that pixel’s neighbors
present numerous details about the pixel’s authentic worth.
With this in thoughts, one may argue that progressively ablating
pixels one after the other is a slightly meaningless factor to do. Can
we as an alternative carry out ablations with characteristic correlation in thoughts?
One easy manner to do that is solely compute the
heart of mass
of the saliency map, and ablate a boxed area centered on
the middle of mass. This exams whether or not or not the saliency map
is mostly highlighting an vital area within the picture. We plot
changing the boxed area across the saliency map utilizing mean-imputation
and blurring beneath as properly (Imply Heart and Blur Heart, respectively).
As a management, we evaluate in opposition to a saliency map generated from random gaussian
noise (Random Noise within the plot).
Utilizing the coaching distribution and utilizing the uniform distribution
outperform most different strategies on the highest okay ablation exams. The
blur baseline impressed by
does equally properly on the blur top-k check. All strategies
carry out equally on the mass heart ablation exams. Mouse
over the legend to spotlight a single curve.
The ablation exams appear to point some fascinating traits.
All strategies do equally on the mass heart ablation exams, and
solely barely higher than random noise. This can be as a result of the
object of curiosity usually lies within the heart of the picture – it
isn’t arduous for random noise to be centered on the picture. In distinction,
utilizing the coaching knowledge or a uniform distribution appears to do fairly properly
on the top-k ablation exams. Curiously, the blur baseline
impressed by
does fairly properly on the highest okay baseline exams, particularly when
we ablate pixels by blurring them! Would the uniform
baseline do higher in case you ablate the picture with uniform random noise?
Maybe the coaching distribution baseline would do even higher in case you ablate a picture
by progressively changing it with a unique picture. We go away
these experiments as future work, as there’s a extra urgent query
we have to focus on.
The Pitfalls of Ablation Exams
Can we actually belief the ablations exams offered above? We ran every technique with 500 samples.
Fixed baselines are likely to not want as many samples
to converge as baselines over distributions. How can we pretty evaluate between baselines which have
completely different computational prices? Invaluable however computationally-intensive future work could be
evaluating not solely throughout baselines but additionally throughout variety of samples drawn,
and for the blur and gaussian baselines, the parameter (sigma).
As talked about above, we’ve got outlined many notions of missingness aside from
mean-imputation or blurring: extra in depth comparisons would additionally evaluate
all of our baselines throughout all the corresponding notions of lacking knowledge.
However even with all of those added comparisons, do ablation
exams actually present a well-founded metric to guage attribution strategies?
The authors of
in opposition to ablation exams. They level out that when we artificially ablate
pixels a picture, we’ve got created inputs that don’t come from
the unique knowledge distribution. Our educated mannequin has by no means seen such
inputs. Why ought to we anticipate to extract any cheap info
from evaluating our mannequin on them?
Then again, built-in gradients and anticipated gradients
depend on presenting interpolated photos to your mannequin, and until
you make some unusual convexity assumption, these interpolated photos
don’t belong to the unique coaching distribution both.
Usually, whether or not or not customers ought to current
their fashions with inputs that don’t belong to the unique coaching distribution
is a topic of ongoing debate
the purpose raised in
vital one: “it’s unclear whether or not the degradation in mannequin
efficiency comes from the distribution shift or as a result of the
options that have been eliminated are actually informative.”
Different Analysis Metrics
So what about different analysis metrics proposed in latest literature? In
an ablation check the place we first ablate pixels within the coaching and
check units. Then, we re-train a mannequin on the ablated knowledge and measure
by how a lot the test-set efficiency degrades. This method has the benefit
of higher capturing whether or not or not the saliency technique
highlights the pixels which can be most vital for predicting the output class.
Sadly, it has the disadvantage of needing to re-train the mannequin a number of
occasions. This metric can also get confused by characteristic correlation.
Think about the next situation: our dataset has two options
which can be extremely correlated. We prepare a mannequin which learns to solely
use the primary characteristic, and fully ignore the second characteristic.
A characteristic attribution technique may precisely reveal what the mannequin is doing:
it’s solely utilizing the primary characteristic. We may ablate that characteristic within the dataset,
re-train the mannequin and get comparable efficiency as a result of comparable info
is saved within the second characteristic. We would conclude that our characteristic
attribution technique is awful – is it? This downside matches into a bigger dialogue
about whether or not or not your attribution technique
needs to be “true to the mannequin” or “true to the information”
which has been mentioned in a number of latest articles
In
sanity checks that saliency strategies ought to move. One is the “Mannequin Parameter
Randomization Check”. Primarily, it states {that a} characteristic attribution
technique ought to produce completely different attributions when evaluated on a educated
mannequin (assumedly a educated mannequin that performs properly) and a randomly initialized
mannequin. This metric is intuitive: if a characteristic attribution technique produces
comparable attributions for random and educated fashions, is the characteristic
attribution actually utilizing info from the mannequin? It’d simply
be relying completely on info from the enter picture.
However think about the next determine, which is one other (modified) model
of MNIST. We’ve generated anticipated gradients attributions utilizing the coaching
distribution as a baseline for 2 completely different networks. One of many networks
is a educated mannequin that will get over 99% accuracy on the check set. The opposite
community is a randomly initialized mannequin that doesn’t do higher than random guessing.
Ought to we now conclude that anticipated gradients is an unreliable technique?
community has randomly initialized weights, the opposite will get >99% accuracy
on the check set.
In fact, we modified MNIST on this instance particularly in order that anticipated gradients
attributions of an correct mannequin would look precisely like these of a randomly initialized mannequin.
The way in which we did that is just like the decoy MNIST dataset, besides as an alternative of the highest left
nook encoding the category label, we randomly scattered noise througout every coaching and
check picture the place the depth of the noise encodes the true class label. Usually,
you’ll run these sorts of saliency technique sanity checks on un-modified knowledge.
However the reality is, even for pure photos, we don’t truly
know what an correct mannequin’s saliency maps ought to seem like.
Totally different architectures educated on ImageNet can all get good efficiency
and have very completely different saliency maps. Can we actually say that
educated fashions ought to have saliency maps that don’t seem like
saliency maps generated on randomly initialized fashions? That isn’t
to say that the mannequin randomization check doesn’t have advantage: it
does reveal fascinating issues about what saliency strategies are are doing.
It simply doesn’t inform the entire story.
As we talked about above, there’s quite a lot of metrics which have been proposed to judge
interpretability strategies. There are a lot of metrics we don’t explicitly focus on right here
Every proposed metric comes with their varied execs and cons.
Usually, evaluating supervised fashions is considerably easy: we put aside a
test-set and use it to judge how properly our mannequin performs on unseen knowledge. Evaluating explanations is tough:
we don’t know what our mannequin is doing and haven’t any floor reality to match
in opposition to.
Conclusion
So what needs to be accomplished? Now we have many baselines and
no conclusion about which one is the “finest.” Though
we don’t present in depth quantitative outcomes
evaluating every baseline, we do present a basis
for understanding them additional. On the coronary heart of
every baseline is an assumption about missingness
in our mannequin and the distribution of our knowledge. On this article,
we make clear a few of these assumptions, and their affect
on the corresponding path attribution. We lay
groundwork for future dialogue about baselines within the
context of path attributions, and extra usually about
the connection between representations of missingness
and the way we clarify machine studying fashions.
utilizing a black baseline
and anticipated gradients utilizing the coaching knowledge
as a baseline.
Associated Strategies
This work focuses on a selected interpretability technique: built-in gradients
and its extension, anticipated gradients. We refer to those
strategies as path attribution strategies as a result of they combine
importances over a path. Nonetheless, path attribution strategies
signify solely a tiny fraction of current interpretability strategies. We focus
on them right here each as a result of they’re amenable to fascinating visualizations,
and since they supply a springboard for speaking about missingness.
We briefly cited a number of different strategies at first of this text.
A lot of these strategies use some notion of baseline and have contributed to
the dialogue surrounding baseline decisions.
In
a model-agnostic technique to elucidate neural networks that’s primarily based
on studying the minimal deletion to a picture that adjustments the mannequin
prediction. In part 4, their work incorporates an prolonged dialogue on
tips on how to signify deletions: that’s, tips on how to signify lacking pixels. They
argue that one pure approach to delete pixels in a picture is to blur them.
This dialogue impressed the blurred baseline that we offered in our article.
In addition they focus on how noise can be utilized to signify missingness, which
was a part of the inspiration for our uniform and gaussian noise baselines.
In
suggest a characteristic attribution technique known as deepLIFT. It assigns
significance scores to options by propagating scores from the output
of the mannequin again to the enter. Much like built-in gradients,
deepLIFT additionally defines significance scores relative to a baseline, which
they name the “reference”. Their paper has an prolonged dialogue on
why explaining relative to a baseline is significant. In addition they focus on
a couple of completely different baselines, together with “utilizing a blurred model of the unique
picture”.
The listing of different associated strategies that we didn’t focus on
on this article goes on: SHAP and DeepSHAP
layer-wise relevance propagation
LIME
RISE
Grad-CAM
amongst others. Many strategies for explaining machine studying fashions
outline some notion of baseline or missingness,
as a result of missingness and explanations are carefully associated. After we clarify
a mannequin, we frequently wish to know which options, when lacking, would most
change mannequin output. However so as to take action, we have to outline
what lacking means as a result of most machine studying fashions can’t
deal with arbitrary patterns of lacking inputs. This text
doesn’t focus on all the nuances offered alongside
every current technique, however you will need to word that these strategies have been
factors of inspiration for a bigger dialogue about missingness.
[ad_2]
Source link
